heroiclabs/nakama



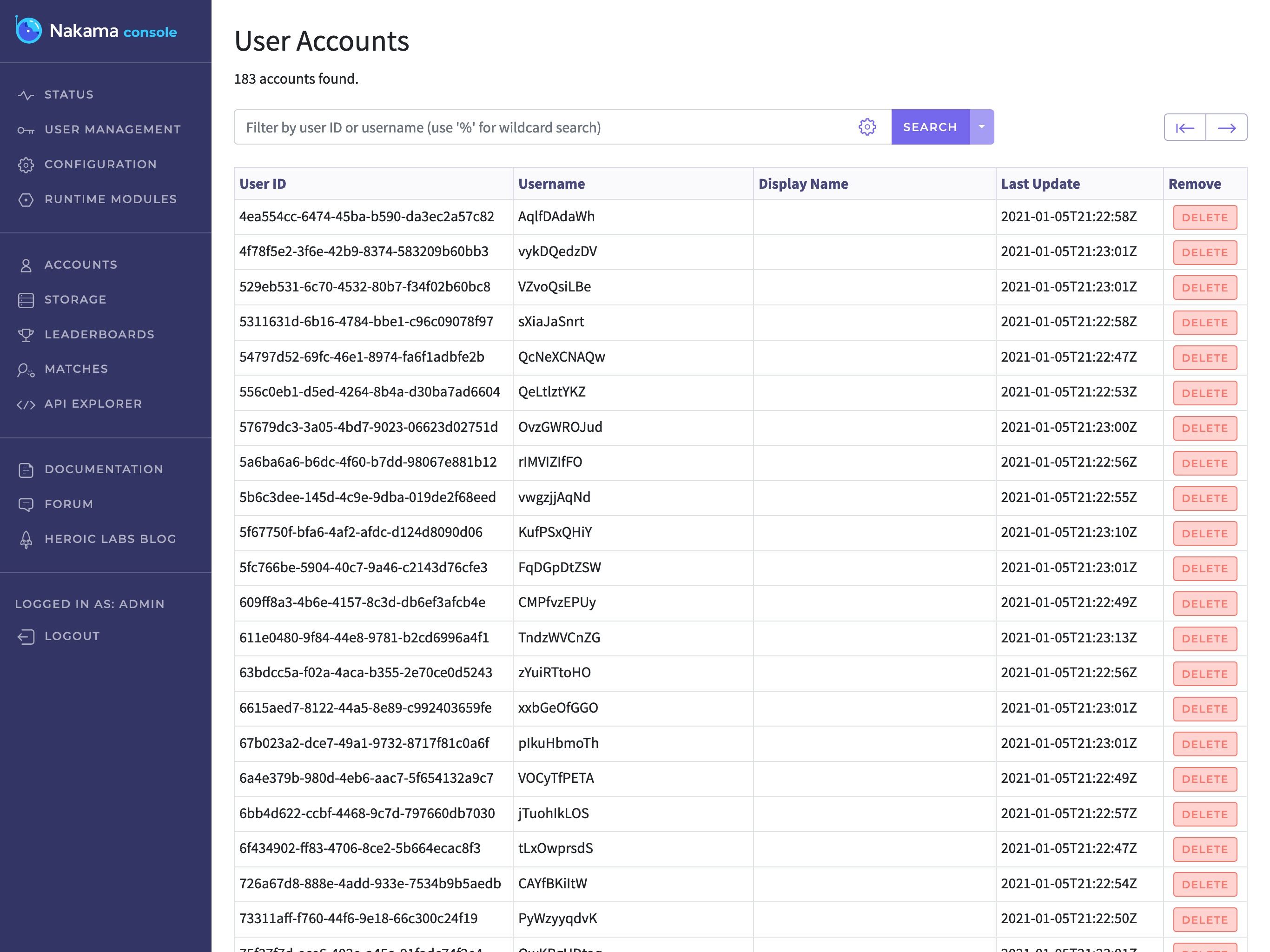
Nakama 是一个用于社交和实时游戏及应用的分布式服务器。
- 用户注册/登录支持社交网络、电子邮件或设备 ID。
- 存储用户记录、设置和其他对象。
- 内置社交图谱,允许用户连接朋友并加入群组。
- 支持一对一、群组和全球聊天,并保存聊天历史记录。
- 提供实时或回合制的多人游戏功能。
- 动态排行榜,可以根据需要创建多个排行榜。
- 组织比赛,邀请玩家竞争并链接多个赛事以创建联赛。
- 支持团队玩法,用户可以组成小队进行沟通与协作。
- 验证应用内购买及订阅服务。
- 向连接的客户端发送消息和通知。
TheRobotStudio/SO-ARM100




SO-ARM100 是一个开源的机器人臂项目,旨在提供易于组装和使用的标准化解决方案。
- 提供 SO-100 和 SO-101 版本的机器人臂设计
- 改进了电线布局,简化了组装过程,无需拆卸齿轮
- 使用更新型电机,提高性能和可靠性
- 与开源 LeRobot 库无缝兼容,支持 AI 机器人技术的发展
- 提供自制或购买组件的灵活选择,包括 3D 打印部件选项
microsoft/vscode-jupyter



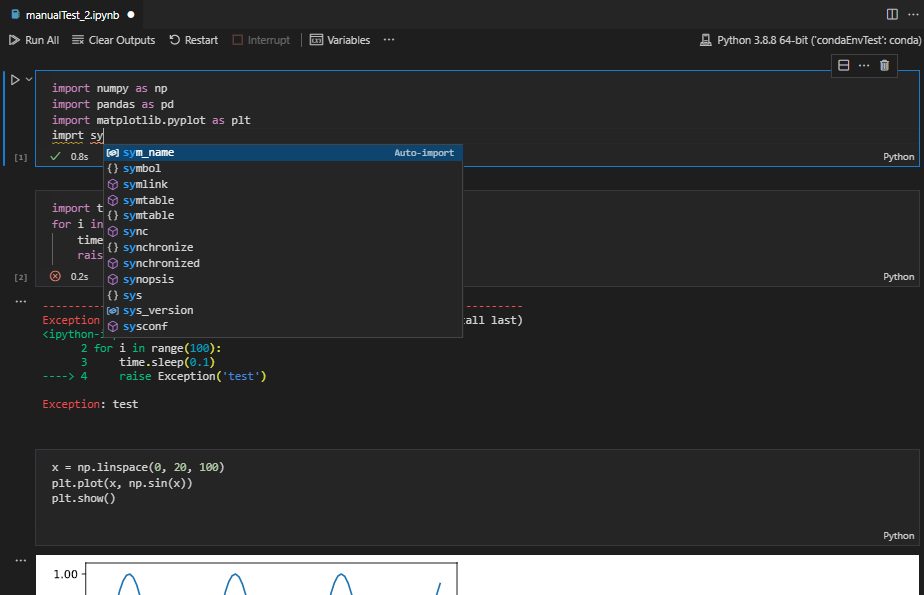
vscode-jupyter 是一个为 Visual Studio Code 提供基本笔记本支持的 Jupyter 扩展。
- 支持多种语言内核,包括 Python、Julia、R 和 C#。
- 允许使用任何安装了 Jupyter 包的 Python 环境作为内核。
- 提供与 VS Code 的深度集成,享受丰富的代码编辑功能,如热退出和查找替换。
- 支持在浏览器中编辑 Jupyter 笔记本,方便灵活使用。
- 自动安装增强体验所需的附加扩展,如 Jupyter Keymap 和 Notebook Renderers。
OpenLMLab/MOSS-RLHF




MOSS-RLHF 是一个专注于大型语言模型中人类反馈强化学习(RLHF)技术的开源项目。
- 提供中文和英文奖励模型,具有良好的跨模型泛化能力。
- 深入分析 PPO 算法,并提出 PPO-max 算法以确保稳定的模型训练。
- 开放源代码,支持在大型语言模型中进行奖励模型训练。
- 发布了带有偏好强度标注的 HH-RLHF 数据集及其验证集。
- 旨在帮助研究人员利用人类反馈稳定地训练他们的模型。
ray-project/ray-llm



RayLLM 是一个基于 Ray Serve 的大规模语言模型(LLM)服务解决方案,旨在简化 LLM 的部署和管理。
- 提供一套预配置的开源 LLM,默认设置即插即用。
- 支持托管在 Hugging Face Hub 上或本地磁盘的 Transformer 模型。
- 简化多个 LLM 的部署和新模型的添加过程。
- 独特的自动扩展支持,包括零扩展能力。
- 完全支持多 GPU 和多节点模型部署。
- 高性能功能,如连续批处理、量化和流式传输等。
- 提供类似 OpenAI 的 REST API,便于迁移与交叉测试。